Control mechanism – UVC :
UVC – Upper body vertical control algo + postural reflexes for involuntary movement
Not a single algorithm, but a coordinated system of reflex-based controls. By combining fast automatic responses with higher-level adjustments, UVC ensures stable, upright posture during standing and movement. The result is a balance strategy that is flexible, resilient, and closely modeled after human postural control.
Developer : Dr. Guero Masahiko Yamaguchi – AI & Robot
Lates c file – https://ai2001.ifdef.jp/uvcKHR/main.c
Original code, with sim , v2 ODE source code 2
How Upper Body Vertical Control (UVC) Works
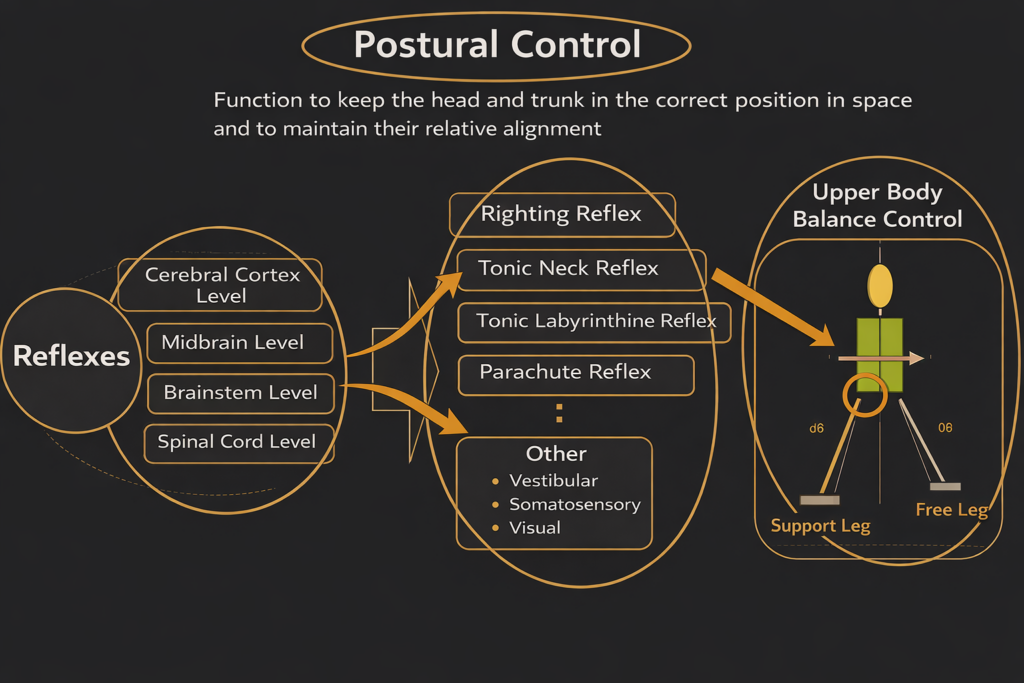
Upper Body Vertical Control (UVC) is a control mechanism that allows a body ( human or robotic )to remain upright, stable, and balanced while standing or moving. Its main purpose is to keep the head and upper body aligned with gravity, even when the legs move or external forces disturb balance.
Rather than relying on a single calculation or command, UVC works through a layered system of automatic responses called postural reflexes. These reflexes operate continuously and adapt in real time, allowing fast and reliable balance control.
A layered control system
UVC is built on multiple levels of control, inspired by the human nervous system. Each level contributes differently:
- Spinal cord level
Provides very fast, local reactions that stabilize muscles and joints. - Brainstem level
Manages core balance and orientation using gravity and body position. - Midbrain level
Coordinates automatic posture adjustments during movement. - Cerebral cortex level
Adds voluntary and learned adjustments, such as intentional posture changes.
These layers work together. Lower levels respond immediately, while higher levels refine and adapt the posture over time.
Reflexes that keep the body upright
UVC relies on several key reflexes, each with a specific role:
- Righting reflex
Restores an upright position when the body tilts or begins to fall. - Tonic neck reflex
Links head orientation to body posture, helping align the trunk and limbs when the head moves. - Tonic labyrinthine reflex
Uses gravity sensing (similar to the inner ear) to maintain vertical alignment. - Parachute reflex
Extends limbs automatically to prevent falling when balance is suddenly lost.
In addition to these reflexes, UVC integrates sensory information from:
- Vestibular input (gravity and acceleration)
- Somatosensory input (joint angles, pressure, contact)
- Visual input (orientation relative to the environment)
Upper body balance during movement
In practice, UVC focuses on keeping the upper body vertical while the lower body moves. When standing on one leg, for example:
- The torso remains upright
- Weight is shifted over the support leg
- Small corrective rotations occur at the hips and trunk
- The free leg can move without destabilizing the body
These adjustments happen automatically and continuously, without the need for explicit planning.
Why UVC is effective
UVC works well because it:
- Reacts faster than conscious control
- Is robust to disturbances and uneven ground
- Does not depend on precise environmental models
- Combines multiple sensory sources for reliability
This makes UVC especially useful in robotics, where maintaining balance in real-world conditions is difficult.
Robot :
Kondo KHR-3 is a 40 cm humanoid robot kit with 22 DOF, aluminum frame driven with ICS 3.0 servos.
Description :
Kondo Kagaku KHR-3HV humanoid kit robot – RobAid
Research paper about robot :
(PDF) Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO)
Partial stl of robot, aluminium parts are missing?? :
KONDO-KAGAKU Robot Parts | 3D CAD Model Library | GrabCAD
Price : cca 2000e + shipping
kondo khr | eBay
Assembly guidelines, testing code, board protocol explained, joint IDs
robotlearn/khr3hv: Library (based on libkondo4) to control the Kondo KHR-3HV robot.
Webots definition
Webots documentation: KONDO’s KHR-3HV